|
I am a first-year Ph.D. student in Mechanical Engineering at the RPM Robotics lab, Seoul National University, advised by Prof. Ayoung Kim. My research interests include Radar-Inertial Odometry and Sensor Fusion. I am particularly interested in leveraging the estimated local gravity to refine the rotation matrix. Email / Google Scholar / Github / LinkedIn |

|
|
|
|
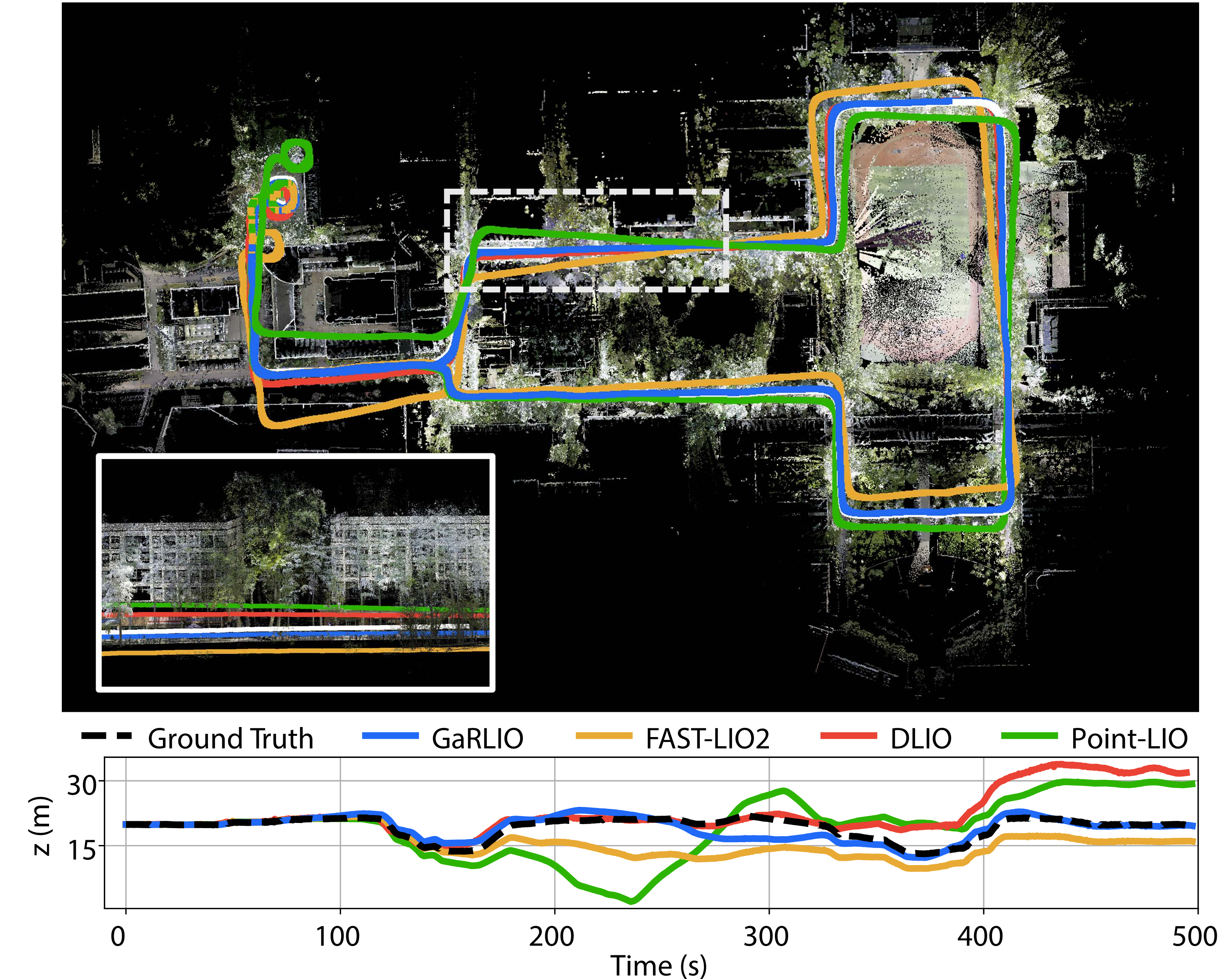
GaRLIO: Gravity enhanced Radar-LiDAR-Inertial Odometry
Chiyun Noh, Wooseong Yang, Minwoo Jung, Sangwoo Jung, Ayoung Kim IEEE International Conference on Robotics and Automation (ICRA), 2025 [arXiv] [code] 𝐆𝐚𝐑𝐋𝐈𝐎, the proposed gravity-enhanced Radar-LiDAR-Inertial Odometry, can 𝐫𝐨𝐛𝐮𝐬𝐭𝐥𝐲 𝐩𝐫𝐞𝐝𝐢𝐜𝐭 𝐠𝐫𝐚𝐯𝐢𝐭𝐲 𝐭𝐨 𝐫𝐞𝐝𝐮𝐜𝐞 𝐯𝐞𝐫𝐭𝐢𝐜𝐚𝐥 𝐝𝐫𝐢𝐟𝐭 while simultaneously enhancing state estimation performance using pointwise velocity measurements. |
|
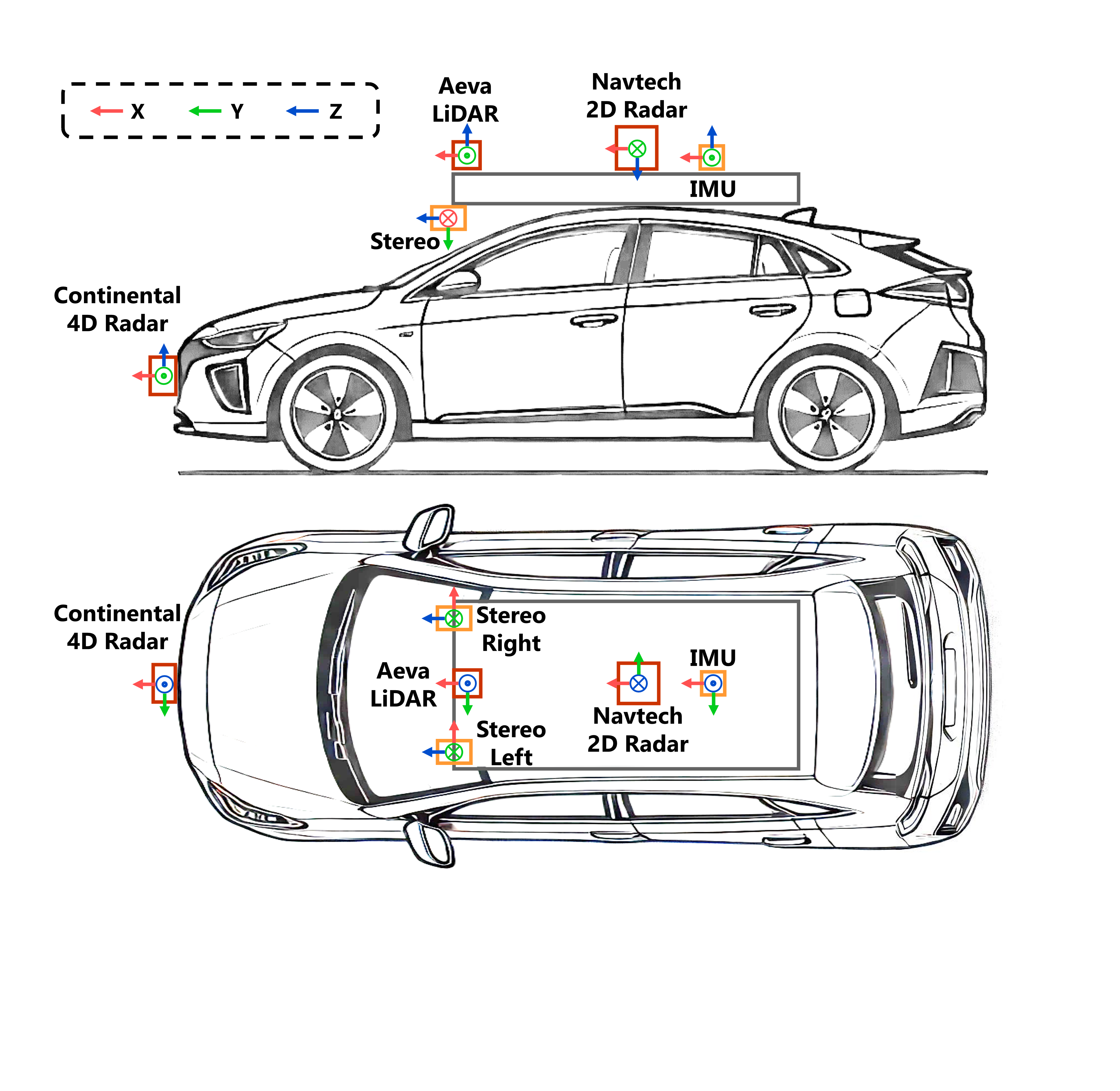
HeRCULES: Heterogeneous Radar Dataset in Complex Urban Environment for Multi-session Radar SLAM
Hanjun Kim, Minwoo Jung, Chiyun Noh, Sangwoo Jung, Hyunho Song, Wooseong Yang, Hyesu Jang, Ayoung Kim IEEE International Conference on Robotics and Automation (ICRA), 2025 [arXiv] [dataset site] HeRCULES introduces the first public dataset with 4D radar, scanning radar, and FMCW LiDAR, enabling radar-LiDAR fusion SLAM & cross-sensor place recognition across diverse urban conditions. |
|
|
|
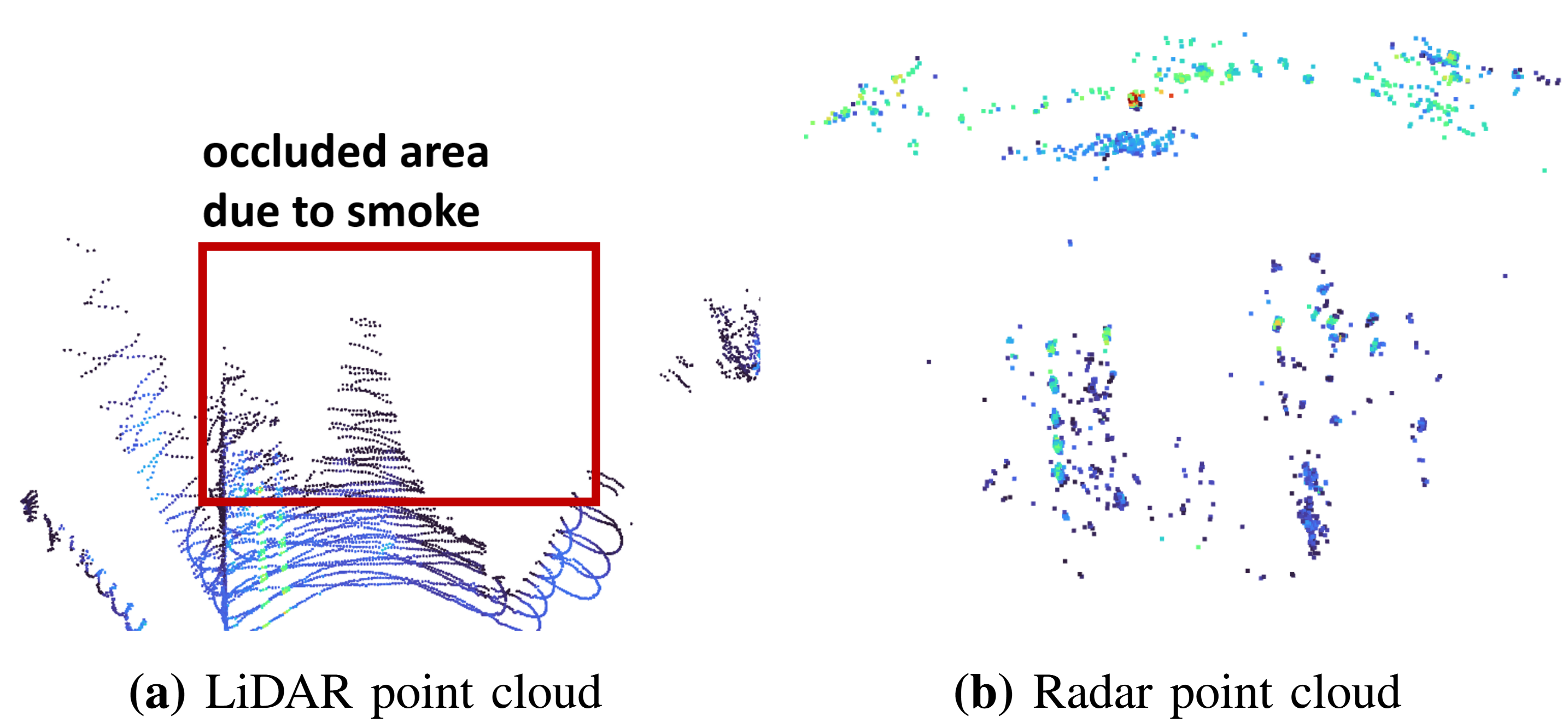
Adaptive LiDAR-Radar Fusion for Outdoor Odometry Across Dense Smoke Conditions
Chiyun Noh, Ayoung Kim Workshop on Radar in Robotics: Resilience from Signal to Navigation, ICRA, 2024 (Best poster award) [arXiv] [Workshop page] The algorithm proposed in this paper enables robust odometry estimation in dense foggy outdoor environments from LiDAR and radar fusion. |
|
|